Autonomous Mobile Manipulator Robot
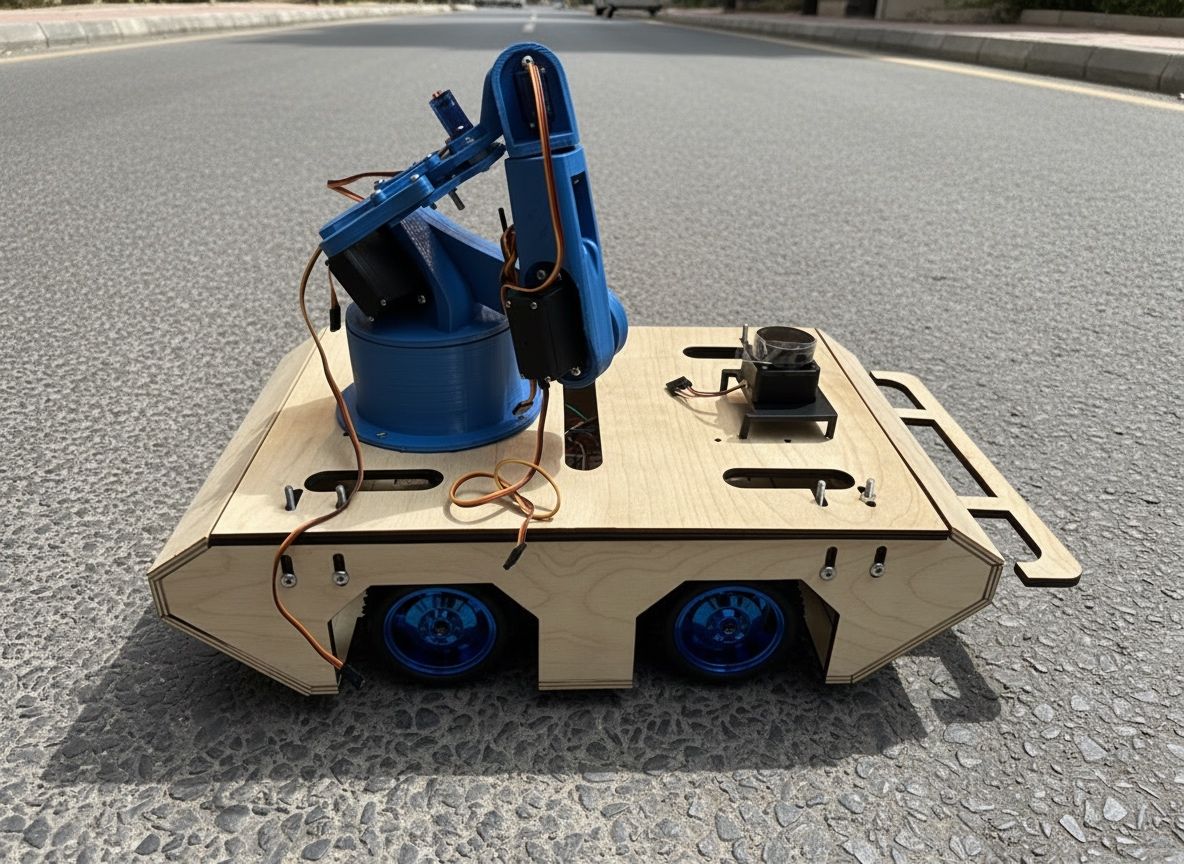
An integrated system for controlling robotic arms and autonomous navigation using LiDAR. Combines perception, planning, and manipulation in a unified ROS2 framework capable of operating in dynamic environments.
Hello, I'm
AI & Robotics Engineer
Robotics Corner · Autonomous Systems & Intelligent Perception

I'm an AI & Robotics Engineer based in Egypt, passionate about building autonomous systems that bridge the gap between perception and action.
Driven AI & Robotics Engineer with a strong academic foundation in Artificial Intelligence from Misr University for Science and Technology. I specialize in developing autonomous systems, with hands-on experience in ROS/ROS2, computer vision, and machine learning.
My work focuses on bridging the gap between perception and action through projects involving autonomous mobile manipulators and real-time object tracking. From converting joystick-controlled robots to fully autonomous navigation systems to collaborating on self-driving vehicle capabilities, I thrive at the intersection of software intelligence and physical robotics.
Developing intelligent navigation and manipulation systems using ROS2 and LiDAR sensing.
Building real-time computer vision pipelines with OpenCV and deep learning models.
Training and deploying CNNs and neural networks for intelligent decision-making.
Implementing mapping and localization algorithms for autonomous mobile robots.
An integrated system for controlling robotic arms and autonomous navigation using LiDAR. Combines perception, planning, and manipulation in a unified ROS2 framework capable of operating in dynamic environments.
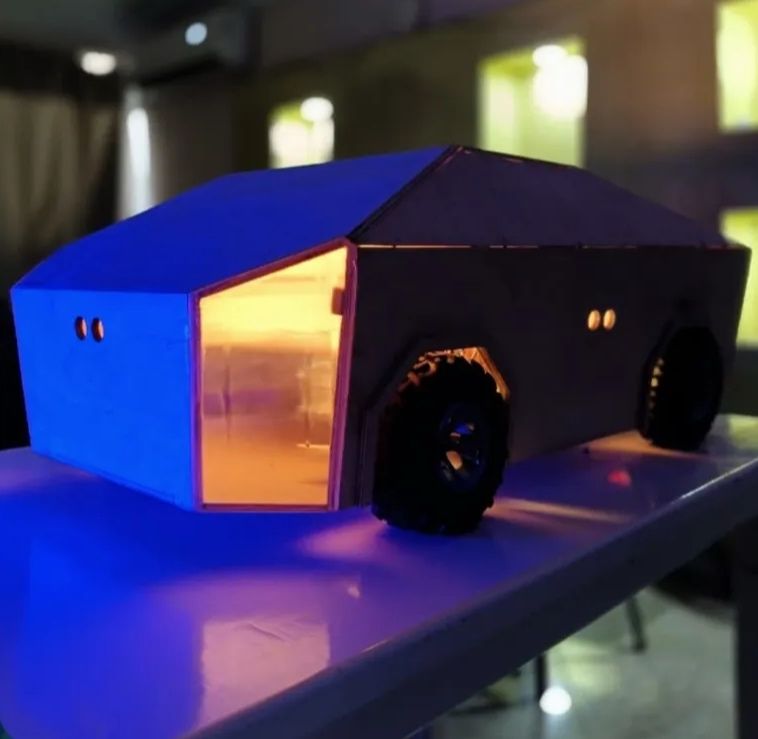
Collaborated with the Robotics Corner team to develop full self-driving capabilities for a Cybertruck platform. Transitioned control from manual joystick operation to fully autonomous navigation with real-time obstacle avoidance.
Capstone project for a professional robotics course, focusing on advanced navigation techniques. Implemented SLAM-based mapping, localization, and multi-goal autonomous navigation using ROS2 and Nav2 stack.
Misr University for Science and Technology (MUST)
GPA: 3.2 / 4.0
Focused on AI, machine learning, autonomous systems, computer vision, and robotics engineering.
Have a project, opportunity, or question? Drop me a message and I'll get back to you within 24 hours.